- Objective: 减少人为干预,真正的机器学习
- Breadcrumb:
# 概念阐释
端到端的学习(end-to-end learning),是深度学习中的一个概念,意思是说AI 的生成过程是从输入端到输出端的,中间的神经网络不需要有人工的[[特征工程 Feature Engineering]]干预和人为添加各种判断条件来进行处理。这种端到端的深度学习范式,目前在[[NLP 自然语言处理]]领域和计算机视觉领域非常流行。
# 实例
## 自动驾驶
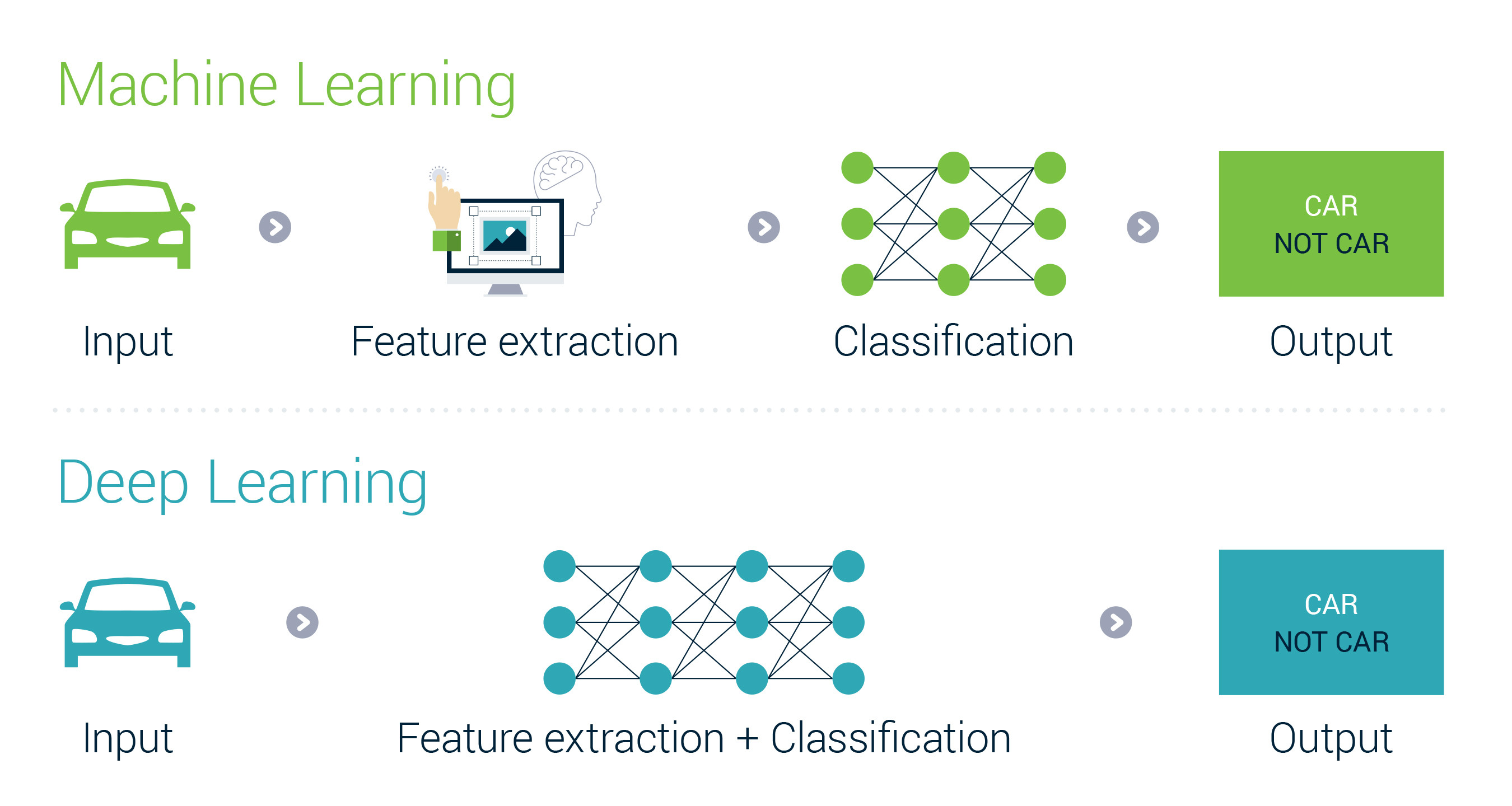
- 传统[[machine learning 机器学习]]方法:
- 人工提取原始数据特征
- 通过神经网络的分类和识别过程,形成结果输出:自动驾驶基于专家人为设计的规则,红灯停绿灯行,变道超车转向打灯,都是靠工程师编程、靠几十万行代码实现的。
- 端到端的深度学习:
- 特斯拉的[[FSD]] v12 版本使用了端到端的方式:摄像头接入外部世界的原始视觉数据(和人眼一样,没有激光雷达等特殊数据),然后不依赖人工处理数据和编程,完全依靠神经网络来处理数据,自动识别模式,提取特征,然后建立某种世界模型,学习和决策驾驶行为。
- [[AlexNet]]
- 省去了传统计算机视觉中的**特征工程步骤**(例如边缘检测、颜色直方图等手动特征提取)。模型直接从原始像素数据开始,通过[[CNN 卷积神经网络|卷积层]]自动学习图像的特征表示,然后通过全连接层完成分类任务。
# 相关内容
# 参考资料
- [4.2 生成式AI对人类学习的启示](https://readwise.io/reader/shared/01jew2fq0hyg572cnk85wsypx8)
- [ ] [[特征工程 Feature Engineering]]:https://readwise.io/reader/shared/01j5pheafkm3vrsxkea97qgg1d